Datasets
Custom Dataset
-
Contact us to request datasets tailored to your physical AI objectives.
Pick from one or both of these customization paths:
Select a fine-grained slice from the ever-growing Amplibotics dataset, filtered and transformed to your precise needs.
Co-design entirely new datasets with our team. Provide your spec and let us do the rest. We fully-manage all equipment and human logistics in-house. Receive high-quality data at the scale your project needs.
Real-world data scarcity no longer has to be the standard. Remove internal overhead and jumpstart your AI breakthroughs today.
-
Tasks
Choose the tasks and subtasks to be performed, annotated how you need.
Objects & Environments
Specify your distribution of objects and background materials. We’ll procure or build them.
Embodiments:
Bimanual or single-arm
Pick from our existing fleet of robots and end effectors, or request specific hardware that fits your distribution targets.
Cameras
Customize camera types, resolutions, frame rates, and mounting positions for the optimal capture.
Pilots
Optionally define human operator requirements, such as task training or domain knowledge.
Data Output
We offer raw high-fidelity captures as well as modeling-ready training sets.
Delivered in your preferred file formats.

Towel Folding - Flight Sticks (1 hr )
-
This real-world data sample contains 1 hour of bimanual towel folding demonstrations. Raw signals are captured from each robot, gripper, camera, and controller.
Data is delivered as an organized collection of MCAP files. Each MCAP file represents one task completion attempt, or 'episode'. Demonstrations are teleoperated and labeled by trained pilots for optimal dataset utility. Measurements are recorded at the listed specifications, and all timestamps are relative to the same global clock. Annotations are provided for all relevant scene, subtask, and operator metadata.
Sample from these captures, or convert to your preferred format for model training. -
1 hour (25 episodes)
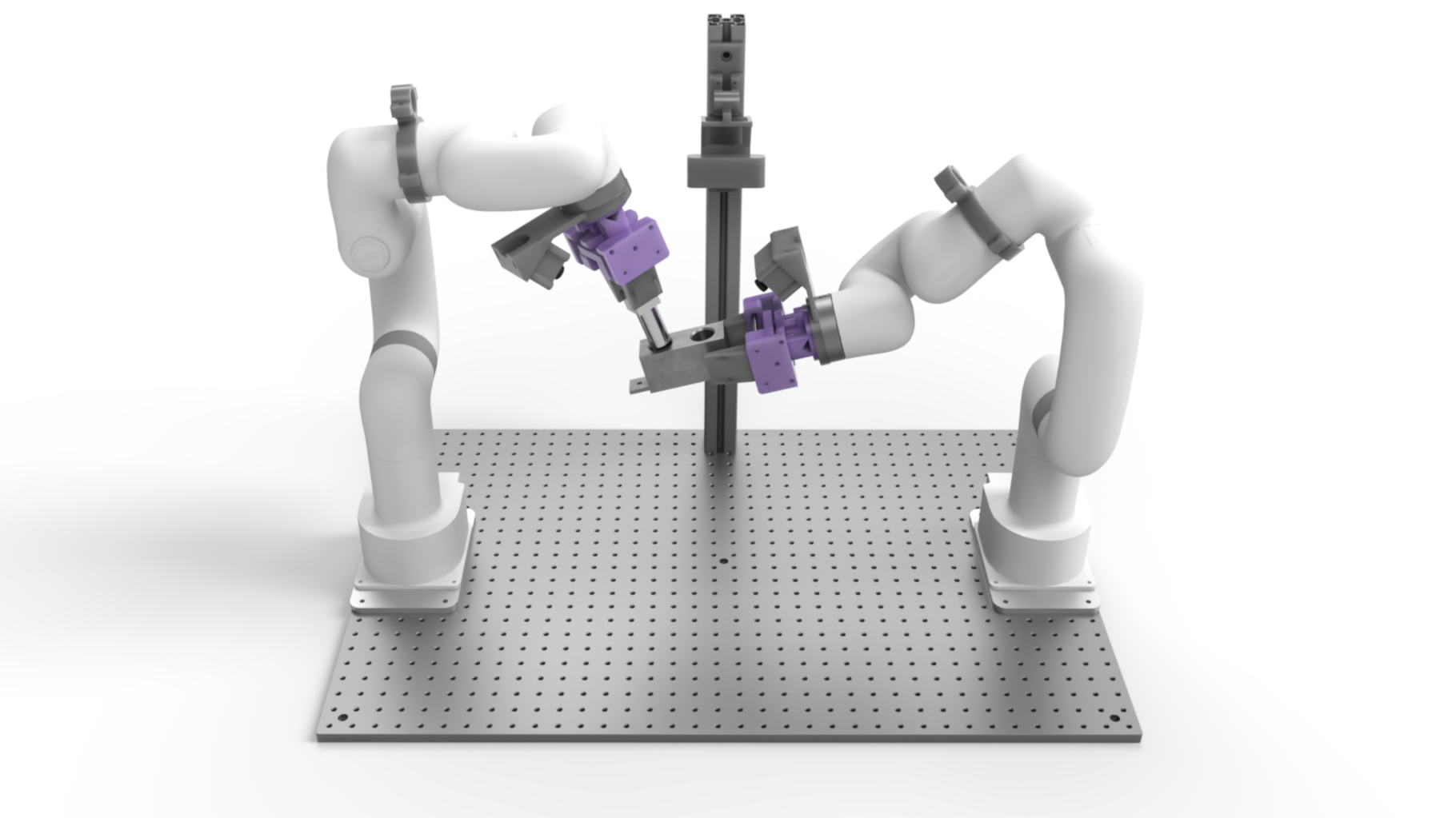
Bimanual Manipulation
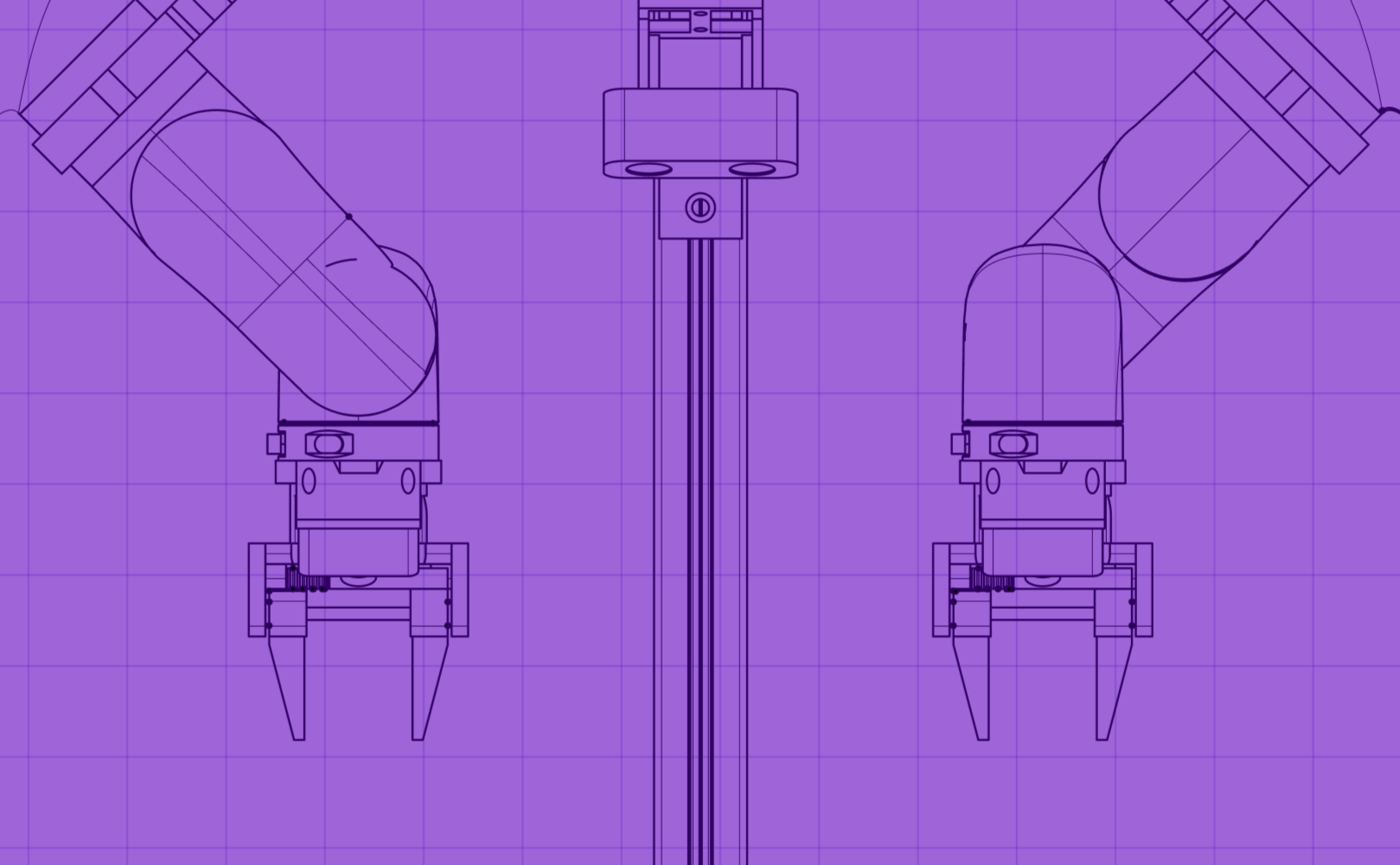
2 UFactory Lite6 arms + 2 Amplibotics parallel jaw grippers
4 Cameras (2 wrist & 1 overhead stereo pair)
1920x1200 camera resolution
30 FPS (synchronized with hardware trigger)
Robot State Frequency: 120+ Hz
Gripper State Frequency: 120+ Hz
Robot Command Frequency: 30 Hz
Gripper Command Frequency: 30 Hz
Teleoperated with flight sticks